
大変申し訳ございません。
記事データが飛んでしまっている事に気づかずに半年以上経ってしまっておりました。
スペースマウス自体は半年前に既に完成しております。
写真データはバックアップがありますが、文章データが飛んでおりますので半年前の記憶を辿りながらの記事作成となります。
大変申し訳ありませんが、完成まで写真メインで駆け足の紹介となってしまいますが何卒よろしくお願い申し上げます。
ー記事編集中ー
残りのハンダ付け
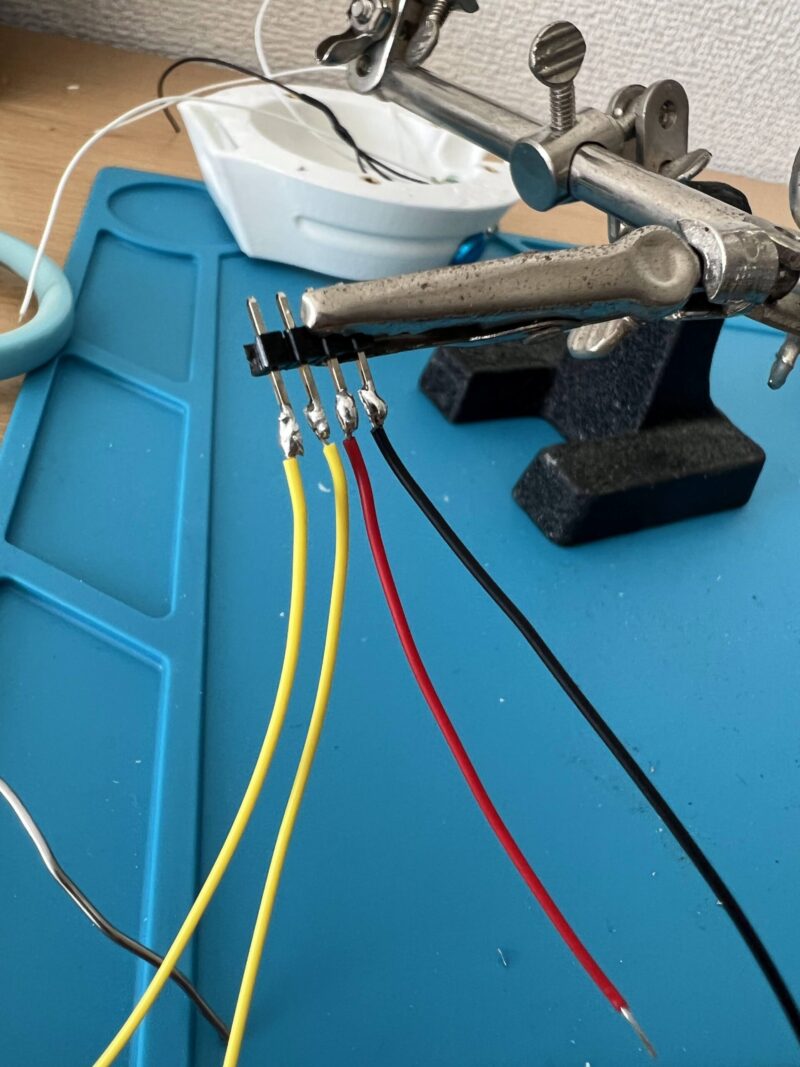
OLEDの部分をハンダ付けしていきます。
ちょっとハンダ多いですね。
ヘルパーハンドで挟みながら作業するとやりやすいです。

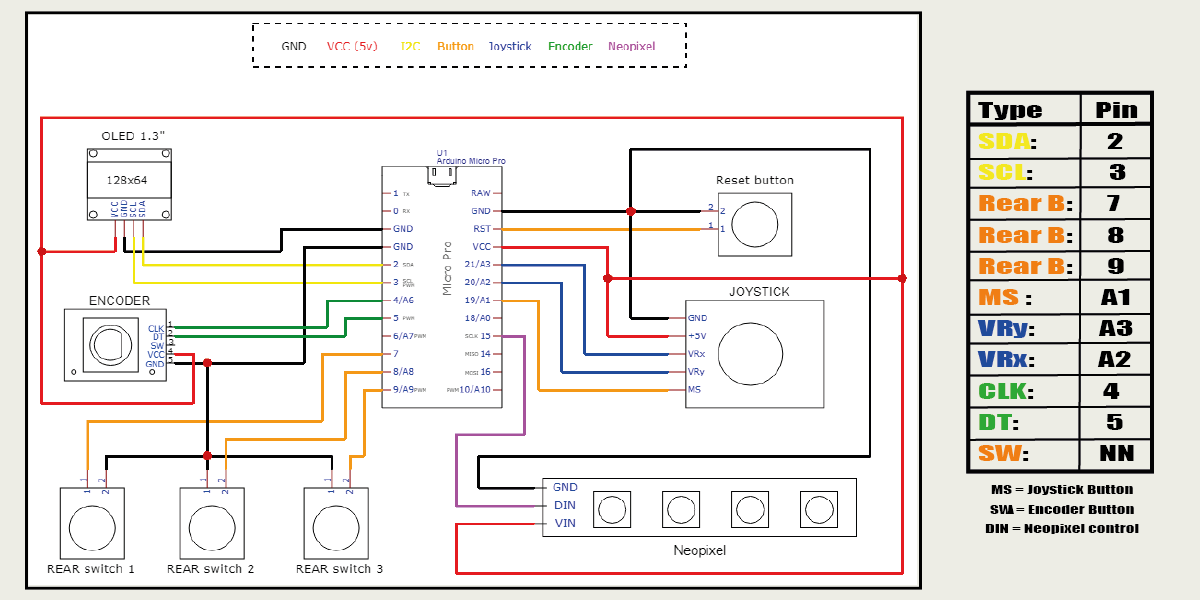
※OLED配線の注意点
今回購入したOLEDは配線図と「VCC」「GND」の位置が違いました。
実物をよく確認して配線する端子を間違えないように気を付けましょう。
隣同士の端子が接触する事はあまりないと思いますが、他の露出部分と接触する可能性がありますので熱収縮チューブで保護していきます。ヒートガンが無ければドライヤーやライターでも収縮させられます。ライター使用の際は注意が必要です。
配線がしやすいので細めのケーブルにしてよかったと思います。
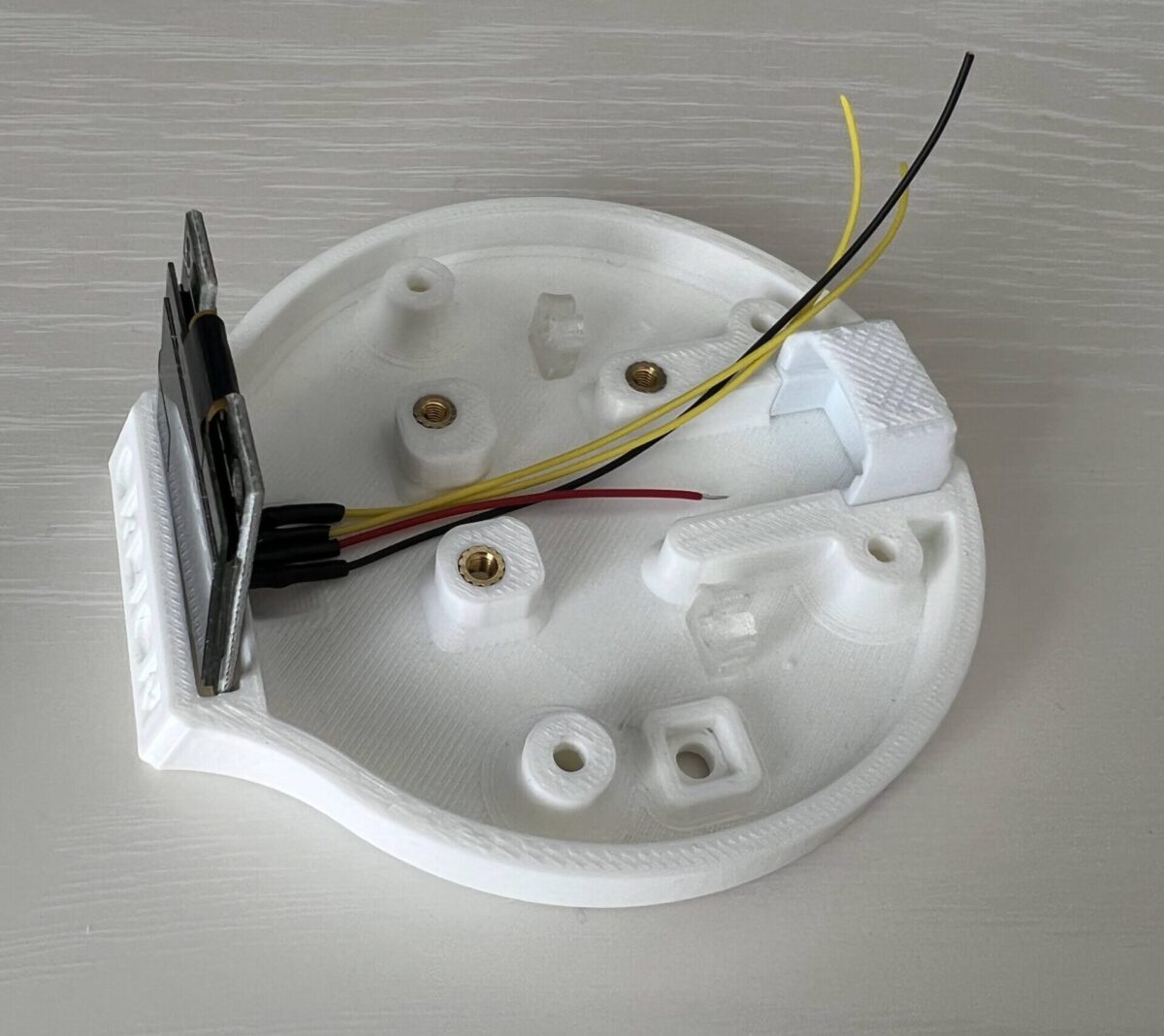
経路を確認して仮配置しながら進めていきます。
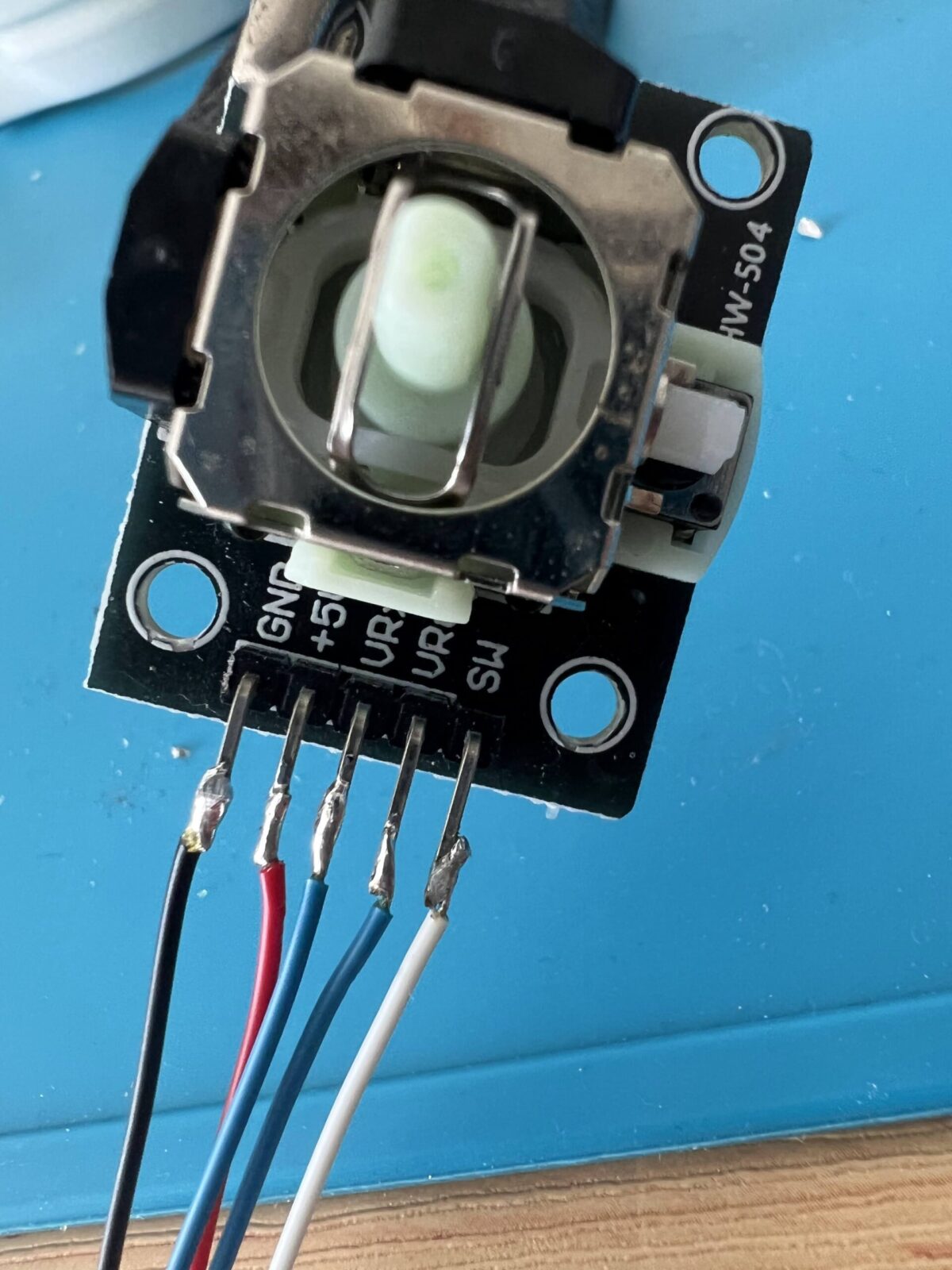
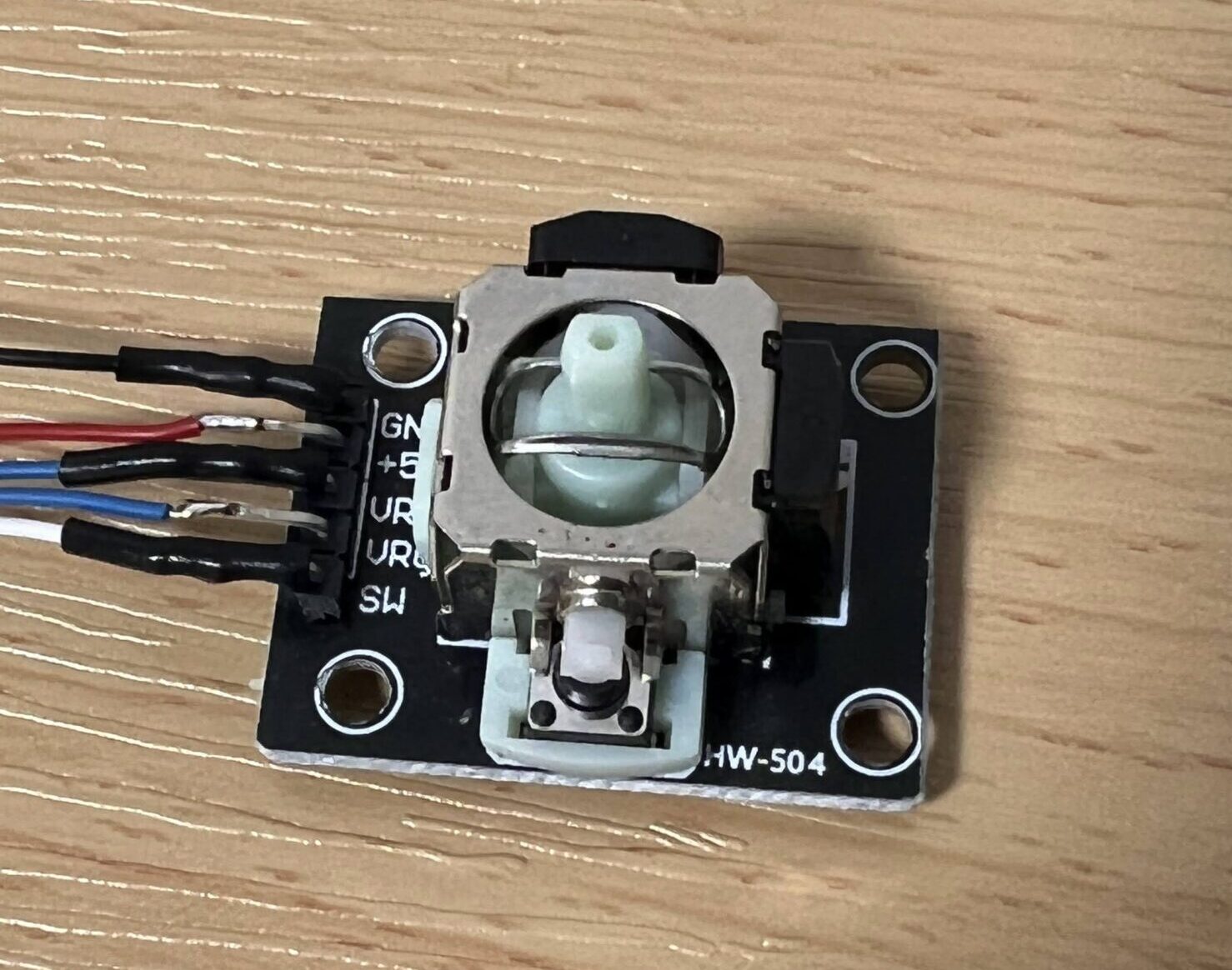
ジョイスティック部分の配線をしていきます。
※配線図は”MS”と書いてありますが”SW”の間違いだと思います。
こちらにも収縮チューブをつけていきます。
面倒くさがりなので、全てに付けずに飛び飛びに3本だけつけました(-“-)
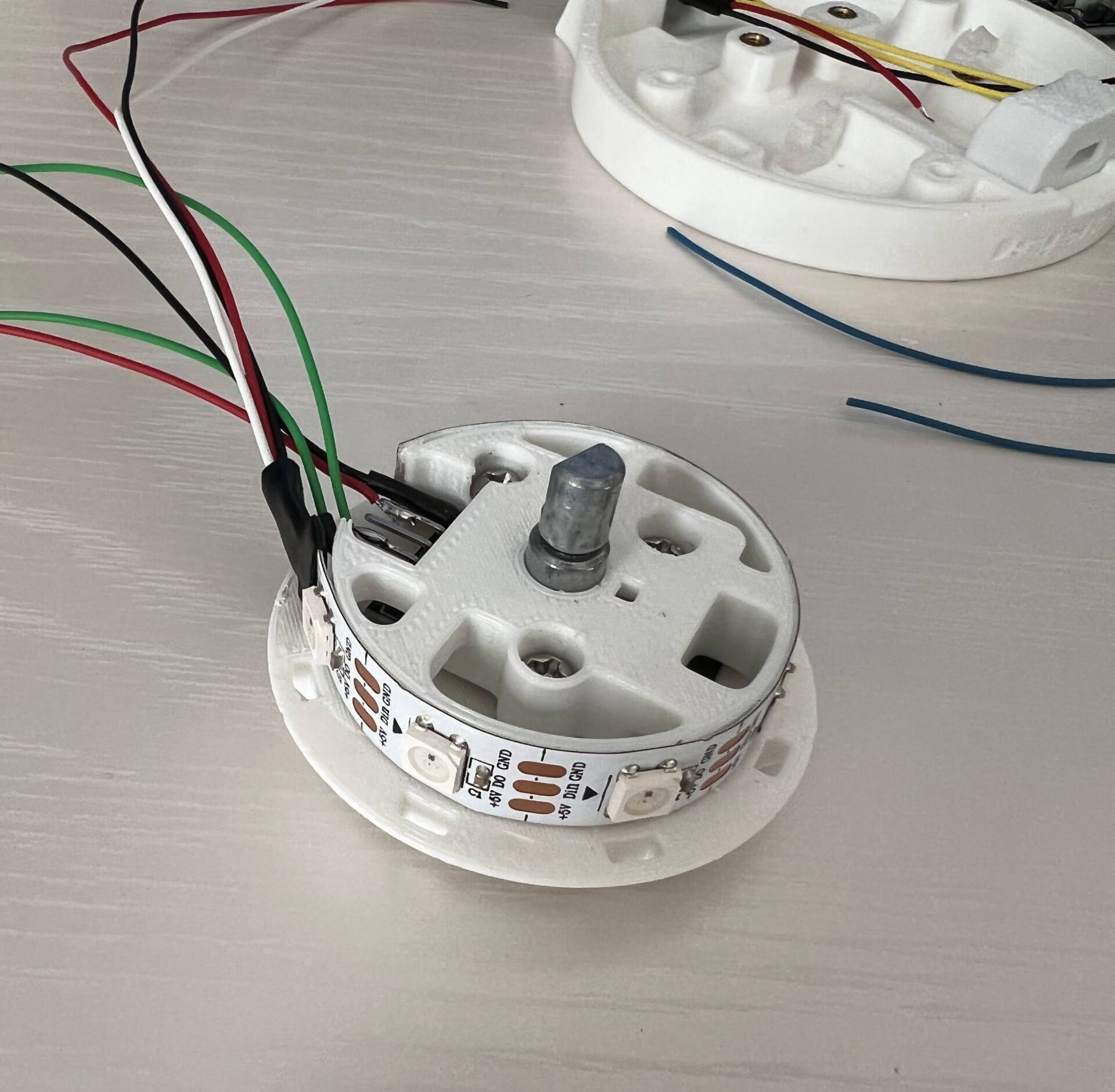
LEDテープを巻いて貼り付けます。端っこ部分はめくれやすいので注意してください。
こちらも仮配置して導線を確認しつつ進めていきます。

配線経路がしっかり確保された設計となっています!
いい設計ですね~( ^ω^ )
配線ワイヤが太いとちょっと手こずりそうです。

Arduinoにハンダ付けしていきますが、その前に本体に配線を通しておきます。
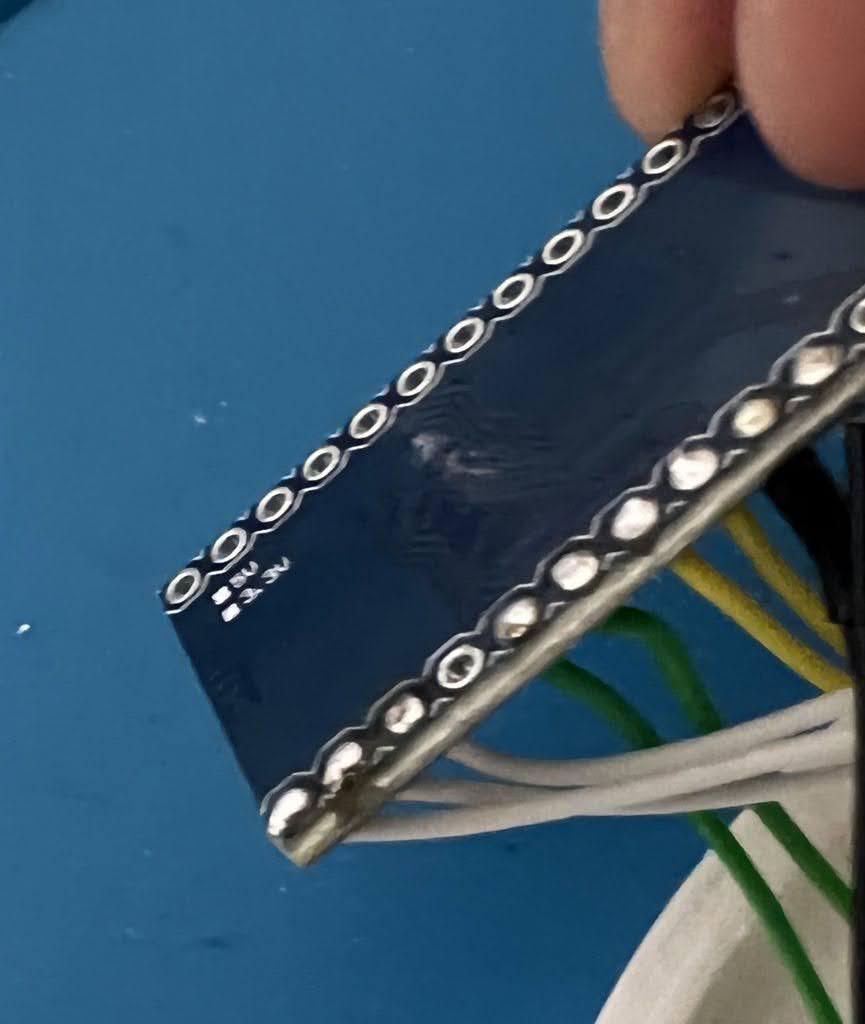
基板へのハンダ付けは線の数が多いので注意しましょう。
ハンダは盛りすぎないように慎重に作業します。
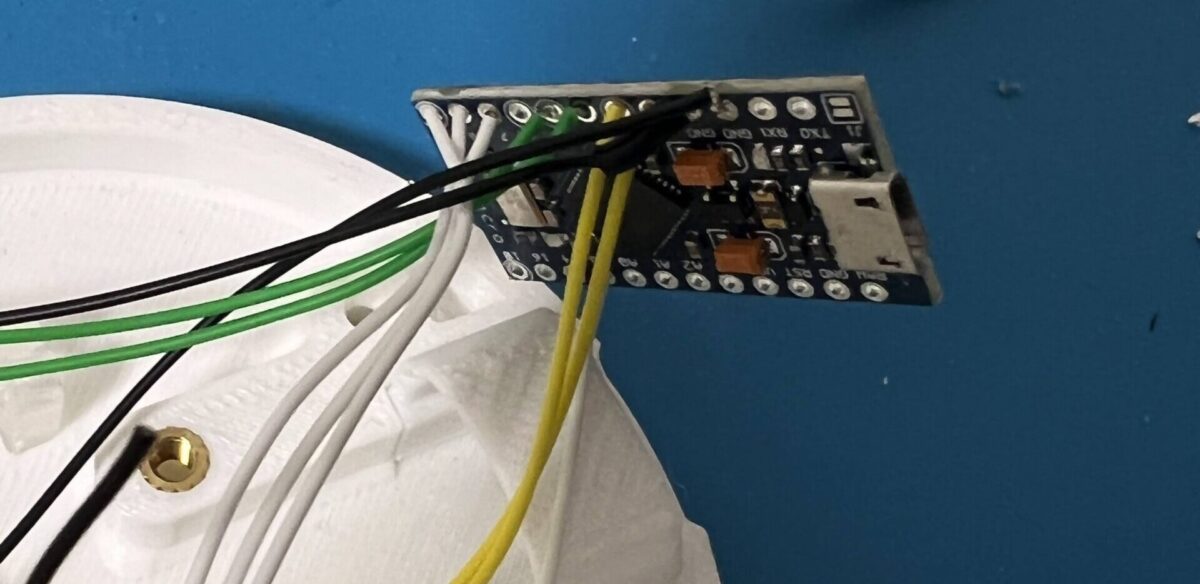
前面から配線を差し込んで、裏側からハンダ付けをしていきました。
前面には電子部品が沢山配置されておりますので、ハンダごてが当たらないように注意しましょう。
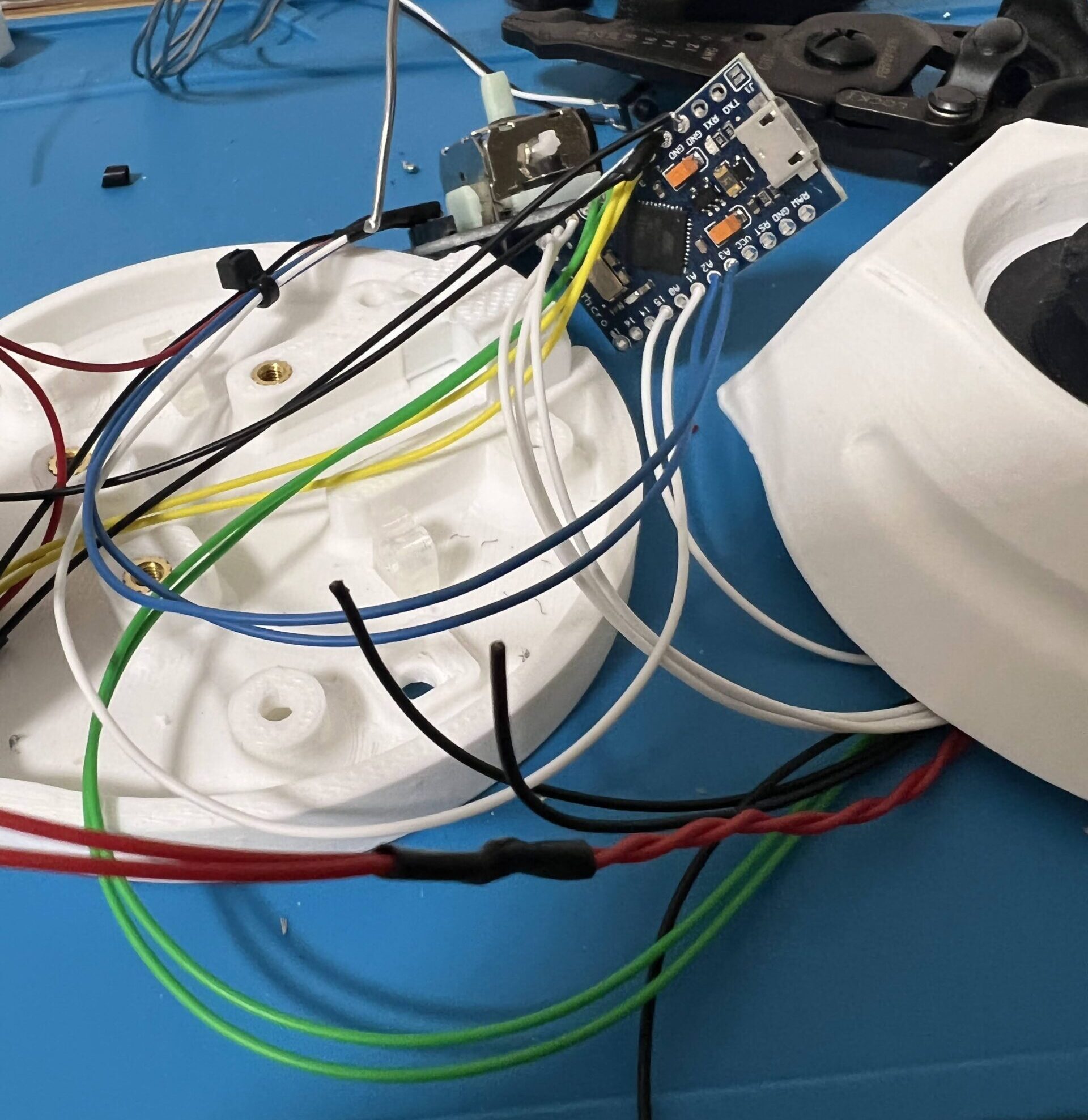
ハンダ付けも完了したので、あとは組み付けてプログラムを書き込めば動作するはずです!
次回
次回 →【その6:完成編】ORBION ver2.5スペースマウスの製作記録
参照
今回作成したスペースマウスの元リンクhttps://github.com/FaqT0tum/Orbion_3D_Space_Mouse
ライセンスはCC BY-NC-ND 4.0となっておりますので営利目的の使用などはできません。詳しくは元リンクをご参照ください。
開発者はイタリアのFaqT0tum様
FaqT0tum様のGithubのページはこちら→https://github.com/FaqT0tum