
モデルの確認
さて、まずは自分がどんなものを作っていくのかを理解していく必要があります。
ここで手を抜いて全く理解しないまま進めていってしまうと、失敗の確率が高くなってしまいます。
専門分野ではない部分も大枠のイメージだけは掴んでおくようにしましょう!(自戒を込めて)
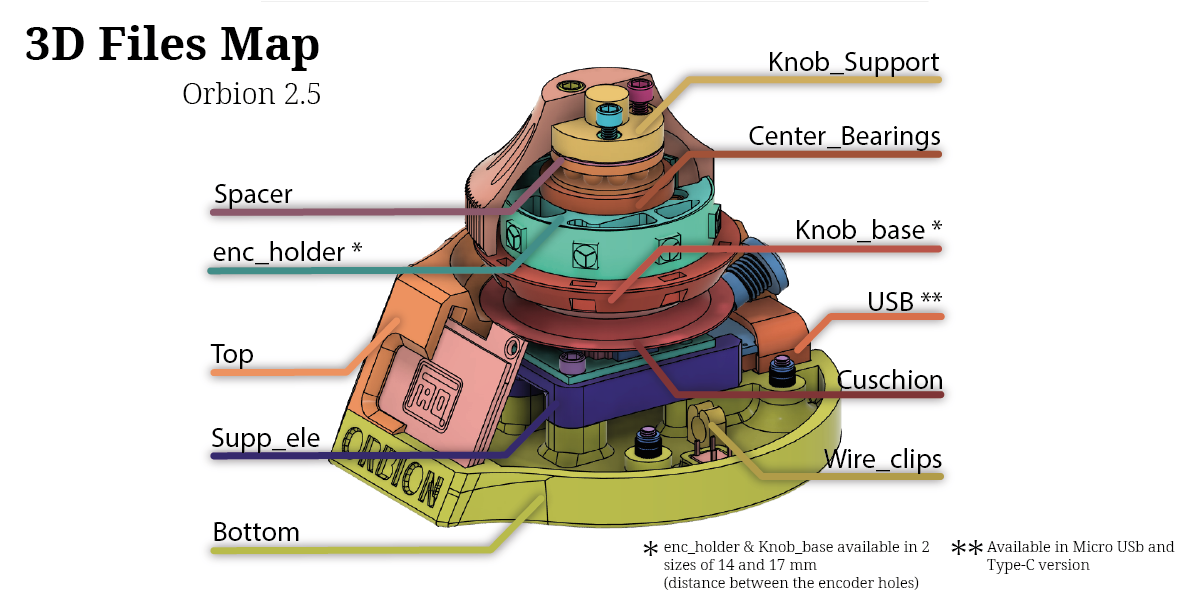
上から順番に見ていきましょう。
- まず一番上にロータリーノブがあります。ロータリーノブはエンコーダとジョイスティックと組付けられているので、360°回転に加え、全方向に倒す動きができます。
- KnobSupportはロータリーノブを固定するサポート。
その下に隙間調整のSpacer、回転を受けるCenter_Bering(ベアリング)があります。 - enc_holderは「エンコーダー」という回転を検知するセンサーを固定する台です。中に配線も通せるようになっています。
- enc_holderの外周にある”Yマーク”のようなものはLEDテープです。LEDが7個付いており、テープのように貼り付けて使用できる制御可能なLEDです。
- Knob_baseはその名の通りロータリーノブの土台です。7つ空いた穴からLEDの光が漏れ出します。
- Cushionはその名の通りクッションです。ロータリーノブを倒した時に弾性力が働いてノブの動きをサポートしてくれます。この部分はTPUで造形します。
- Topは本体の上部です。ちなみにTopの近くにある”FAD”と書かれている部分はディスプレイです。この部分に設定項目などが表示されます。
- Supp_eleにはArduinoの基板を差し込みます。また、上にジョイスティックの基板部分を設置します。
- Bottomは本体の底面です。
- Wire_clipsは配線をまとめるためのクリップです。まぁ最悪無くても別に問題はないのですが、配線を綺麗にまとめるためにあった方が良いです。この部分はTPUで造形します
- ちなみに、Wire_clipsの近くにある「足が4つでているピンク色の部品」はリセットボタンです。裏向きにして底面に配置されます。
- USBはArduinoとPCを接続するためのジャック部分のサポートです。MicroUSBかType-Cを選べます。(ワイヤレスではありません)
【画像下部記載の注意書きについて】
*「enc_holder」&「Knob_base」は穴間隔が14mmのものと17mmの2パターンがあります。用意したエンコーダーの穴位置によって変わりますので、エンコーダーを購入してから確認しましょう。
(ちなみに私は穴間隔17mmのものでした)
**「USB」はマイクロUSBとType-Cの2パターンあります。
(ちなみに私はPro Micro ATmega32U4 をAli expressにて購入したのでマイクロUSBでした)
回路図の確認
では次は回路図を見ていきましょう。私も回路図はそんなに詳しくありません。
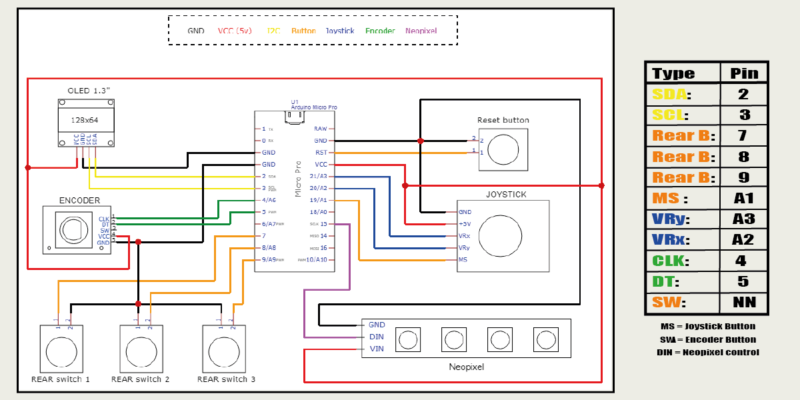
共通項目
・GND
回路の基準となる電位です。接地(アース)と混同しがちですが違います。詳しいGNDの説明についてはこちらのページをご参照ください。https://www.sist.ac.jp/club/mcf/Umeta_lecture/3.html
・VCC(5V)
ICが動作するための回路電圧、電源です。通常は3.3Vか5Vが多いです。こちらの回路は5Vのようですね。
- OLED (Organic Light Emitting Diode)
有機ELディスプレイの事です。電流を流すと発光するダイオードで、バックライトを必要としない安価で使い勝手のいいディスプレイです。
SCL(serial clock)・・・同期をとるための信号です
SDA(serial data)・・・SCLに同期してデータの転送を行います
※Ali explessで注文したOLEDのVCCとGNDの端子は”回路図と逆”になっていましたのでご注意ください! - ENCODER
回転を検知するセンサーで、このタイプはロータリーエンコーダーと言われます。
CLK・・・クロック信号で回転を検知します
DT・・・CLKと働きは同じですが、位相がずれています。CLKとDTの差を読み取る事で時計回りと反時計回りを判断します
SW・・・ENCODERも押し込んでクリックできますが、今回は使用しないため配線は無しです。 - REAR SWITCH
背面に付けるメタルスイッチx3個です。モーメンタリスイッチなので押した瞬間だけスイッチが反応します。プラスマイナスは無いので左右の端子どちらに1.2を配線しても同じです。それぞれarduinoの7.8.9インプットに配線されます - Reset Button
モーメンタリスイッチのリセットボタンです。Arduinoをリセットできます。ver2.2ではArduinoのGNDとRSTを短絡させてリセットしていたようですが、ver2.5ではスイッチを押すだけでGNDとRSTが短絡してリセットが発動されます。 - JOY STICK
ゲームのコントローラーなどでもよく見かけるスティック型の入力装置です。
VRx(vertical output)・・・X軸方向の動きの読み取り
VRy(horizontal output)・・・Y軸方向の動きの読み取り
SW・・・ジョイスティックを押し込んだ時のアウトプット。プッシュするとSWがGNDと接続されます。ちなみに回路図ではSWではなく”MS”と書かれています(恐らく便宜上) - Neo Pixel
LEDテープです。
DIN・・・LEDへのデータ入力
VIN・・・入力電圧(input voltage)
ジョイスティックとエンコーダーで動きを検知、背面のボタン3つに好きなキーを割り当て、LEDを光らせる、リセット機能、ディスプレイ出力、といった感じですね。
次回はパーツ購入編
さて、何となく概要がつかめたかと思います。
次回はパーツ購入編に移ります!
前回 → 【その0:はじめに】
次回 → 【その2:パーツリスト確認&パーツ購入編】
参照
今回作成したスペースマウスの元リンクhttps://github.com/FaqT0tum/Orbion_3D_Space_Mouse
ライセンスはCC BY-NC-ND 4.0となっておりますので営利目的の使用などはできません。詳しくは元リンクをご参照ください。
開発者はイタリア?のFaqT0tum様
FaqT0tum様のGithubのページはこちら→https://github.com/FaqT0tum
回路図https://github.com/FaqT0tum/Orbion_3D_Space_Mouse/blob/main/IMG/orbion_sch.png
{kind=link}